Overview
We are interested in the control, learning, and optimization of dynamical systems, and their applications to mobility systems. Our research developed the methodological tools.
Methodologies:
- Dynamics and control
- Data-driven and learning-based control
Applications:
- Traffic flow modeling, estimation and control
- Mixed autonomy traffic systems
- Autonomous and unmanned vehicles
- Urban air mobility
Highlights
Model-based Control: Boundary control of stop-and-go traffic
18This thread of work provides control tools that have been previously unavailable for suppressing stop-and-go oscillations in congested traffic using actuation that is very sparsely located along the freeway, such as ramp metering or variable speed limits. The macroscopic PDEs are particularly suited for modeling large-scale and congested traffic flow patterns, such as the stop-and-go traffic. The aggregated state values (i.e. density, speed, and flow rate) in the models evolve in continuous temporal and spatial domains. Focused on several macroscopic-level traffic problems, our research developed a methodological PDE model-based control framework for boundary actuation and estimation. The backstepping control method is employed which only requires sensing and actuating of state values at boundaries to regulate continuous in-domain values to the desired reference system. The proposed methodology is practical meaningful and relevant since the point actuation and sensing overcomes the technical and financial limitations of implementing sensors and actuators in large-scale transportation systems. We also consider the boundary control problem on freeway traffic of multi-lane, multi-class, and multi-segment.
- H. Yu and M. Krstic, “Traffic congestion control of Aw-Rascle-Zhang model,” Automatica, vol. 100, pp. 38-51, 2019. DOI: 10.1016/j.automatica.2018.10.040.
- H. Yu, and M. Krstic, “Output Feedback Control of Two-lane Traffic Congestion,” Automatica, vol.125, 2021, DOI:10.1016/j.automatica.2020.109379.
- M. Burkhardt, H. Yu, and M. Krstic, “Stop-and-Go Suppression in Two-Class Congested Traffic,” Automatica, vol.125, 2021, DOI: 10.1016/j.automatica.2020.109381.
- H. Yu, Jean Auriol and M. Krstic, “Simultaneous Output Feedback Stabilization of Freeway Traffic Flow on Two Connected Roads,” Automatica, under review.
The practical implementations include data-validation of traffic state estimation and event-triggered for digital implementation.
- H. Yu, Q. Gan, A. M. Bayen, and M. Krstic, “PDE Traffic Observer Validated on Freeway Data,” IEEE Transactions on Control Systems Technology, vol.29, pp. 1048-1060, 2021. DOI: 10.1109/TCST.2020.2989101.
- N. Espita, J. Auriol, H. Yu, and M. Krstic, “Traffic flow control on cascaded roads by event-triggered output feedback,” International Journal of Robust and Nonlinear Control, under review.
Model-free optimization: Extremum seeking of optimal throughput
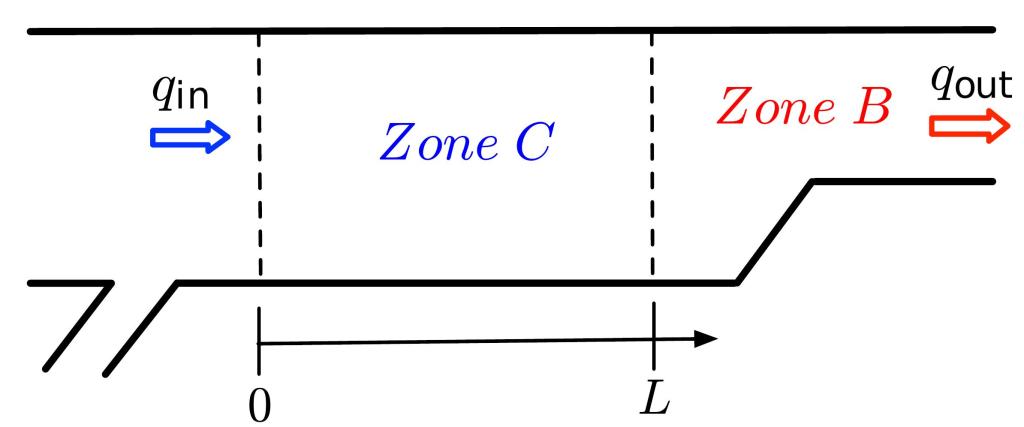
For traffic dynamics that cannot be accurately described with models, our research use extremum seeking (ES), a real-time, model-free, adaptive optimization approach to tackle such problems. We applied ES algorithms to solve a downstream traffic bottleneck problem. Traffic congestion forms upstream of the bottleneck because the traffic flow rate overflows its capacity. Since the traffic dynamics of the bottleneck are hard to model, the optimal input density at the downstream bottleneck area is unknown and needs to be found in order to maximize the discharging flow rate from the bottleneck. A small excitation is used to perturb the input density being tuned and to produce estimates of the gradient of a cost function. An extremum seeking controller is designed with its delay effect being compensated with a predictor feedback design.
- H. Yu, S. Koga, T. R. Oliveira, and M. Krstic, “Extremum seeking for traffic congestion control with a downstream bottleneck,” ASME Journal of Dynamic Systems, Measurement, and Control, vol. 143(3), 2021.
Learning-based control: Reinforcement Control of Traffic Flow

Model-based approaches usually rely on assumptions and knowledge of the system dynamics. For traffic systems, the calibration of model parameters can be laborious, time-consuming, and highly associated with certain transient traffic conditions. Considering the uncertain dynamics and different performance metrics, it is desirable to have an approach with modest tuning to adapt to various problems. Recent developments in Reinforcement Learning (RL) have enabled model-free control of high-dimensional continuous control systems through a complete data-driven process. The model-free RL approach does not have prior assumptions of the model structure and learns a control policy through interactions with the system directly. We developed RL state feedback controllers for congested traffic on a freeway segment. We employed proximal policy optimization, a deep neural network-based policy gradient algorithm, to obtain RL controllers through an iterative training process with a macroscopic traffic simulator. RL controllers are found to have comparable performance with the conventional feedback controllers in a traffic system with the perfect knowledge of model parameters. Remarkably, the RL controllers that were obtained from stochastic training processes outperformed the conventional controllers in an uncertain environment.
- H. Yu, S. Park, A. M. Bayen, S. Moura, and M. Krstic, “Reinforcement Learning versus PDE Backstepping and PI Control for Congested Freeway Traffic,” IEEE Transactions on Control Systems Technology, vol. 30(4), pp. 1595-1611, 2022.
Safety-Critical Traffic Control by Connected Automated Vehicles
Although various longitudinal control strategies have been developed for CAVs to achieve string stability in mixed-autonomy traffic systems, the potential impact of these controllers on safety has not yet been fully addressed. This approach proposes safety-critical traffic control (STC) by Connected automated vehicles (CAVs) that allows a CAV to maintain safety relative to both the preceding vehicle and the following human-driven vehicles (HVs). The safety of both the CAV and HVs is incorporated into the framework through a quadratic program-based controller that minimizes deviation from a nominal stabilizing traffic controller subject to control barrier functions (CBFs)-based safety constraints. The approach utilizes CBFs to impart collision-free behavior with formal safety guarantees to the closed-loop system. The efficacy of this approach in achieving provably safe traffic is demonstrated through extensive numerical simulations that include vehicle trajectories from real data.
- C. Zhao, H. Yu and T. G. Molnar, “Safety-critical traffic control by connected automated vehicles,” Transportation Research Part C: Emerging Technologies, vol. 154, pp. 104230, 2023.
Stochastically exponential stabilization of freeway multi-class traffic: A mean-square backstepping approach

This work addresses the problem of mean-square exponential stabilization for mixed-autonomy traffic on freeways. The mixed-autonomy traffic model is a stochastic system due to the differences in vehicle types and driving behaviors. It can be represented by hyperbolic partial differential equations (PDEs) with time-varying parameters, specifically in the time-varying extended ARZ model. The random parameters can be modeled as a Markov process. We first develop a full-state feedback control law to stabilize the nominal system, which only has time-independent parameters using backstepping transformation. To demonstrate that the nominal backstepping controller can still stabilize the stochastic system, we derive sufficient conditions to guarantee closed-loop mean-square exponential stability using Lyapunov analysis. The theoretical results are validated through numerical simulations.
